Introduction:
According to the urgent needs of social life and development and the international frontier development trend in this field, the ultimate goal of this project is to build a high-precision, high-real-time positioning system for complex large-scale indoor places using CSI. To this end, the project team will propose a series of innovative technical solutions to improve the positioning accuracy of the existing system in complex indoor environments. At the same time, in order to provide positioning services for thousands of users at the same time, the project team will reduce the system operating burden, and improve the real-time performance of the system. The system built by the project team will be oriented to the daily needs of the majority of users, providing 1) accurate and real-time indoor navigation services to quickly guide users to target locations, such as restaurants, toilets, elevators and escalators, etc.; 2) positioning of important property and staff management services, reduce the operating costs of enterprises, and improve management efficiency; 3) based on the user's location, targeted product advertising services can be used to reduce consumers' resistance and improve the effectiveness of advertising.
Methodology:
Signal Separation in Multipath Environment and Signal Reconstruction in Direct Path
In an indoor environment, there are a large number of obstacles that can reflect, refract, and diffract wireless signals. The traditional multipath decomposition algorithm cannot effectively reduce the influence of the signal components corresponding to the reflection path on the direct path signal components during multipath decomposition, resulting in unsatisfactory results of their separation and subsequent reconstruction. Therefore, the project team proposed a new multipath decomposition algorithm that combines the MPP (Multiple-Paths-Pursuit) algorithm and the EM (Expectation Maximization) idea.
Eliminate the ambiguity caused by multipath effects
After the signals from different paths are separated, how to choose a direct path is an important part of the system to finally achieve high-precision positioning. We propose to exploit the continuity of locations of localized objects in the time dimension to identify direct paths. Model the motion of the target as a hidden Markov model and use the Kalman Filter algorithm to solve it.
Reduce the time complexity of the system
In the process of signal separation, our algorithm needs to traverse the entire parameter space, which brings a huge computational burden. We propose progressive meshing of the parameter space.
Achievement:
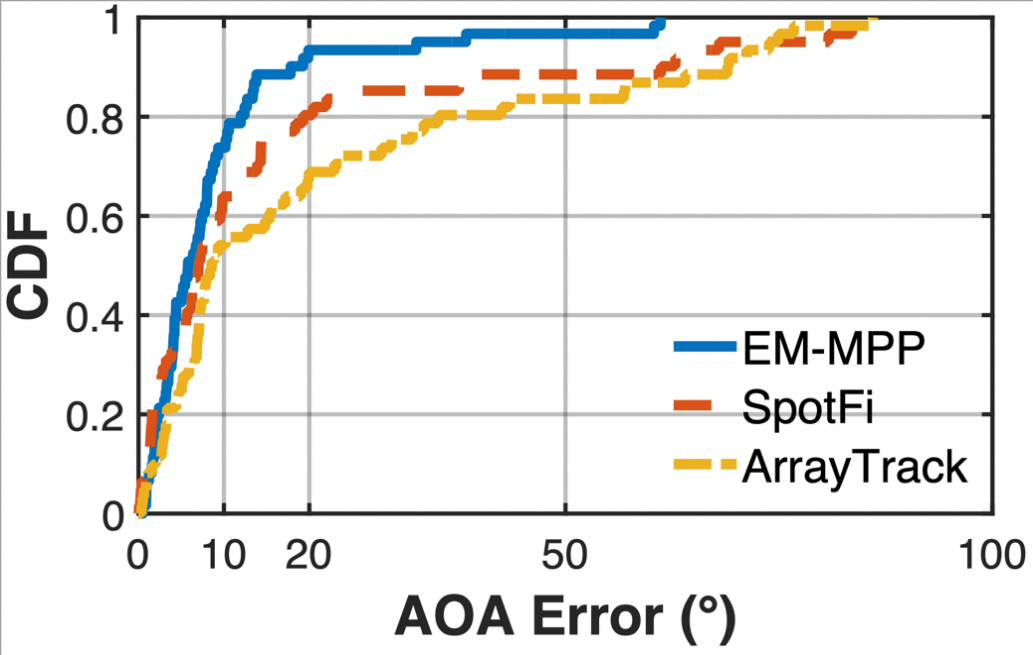
(1) The 80% AOA accuracy of the EM-MPP algorithm is 11 degrees. Such a large AOA accuracy gain will greatly improve the positioning accuracy of our system.
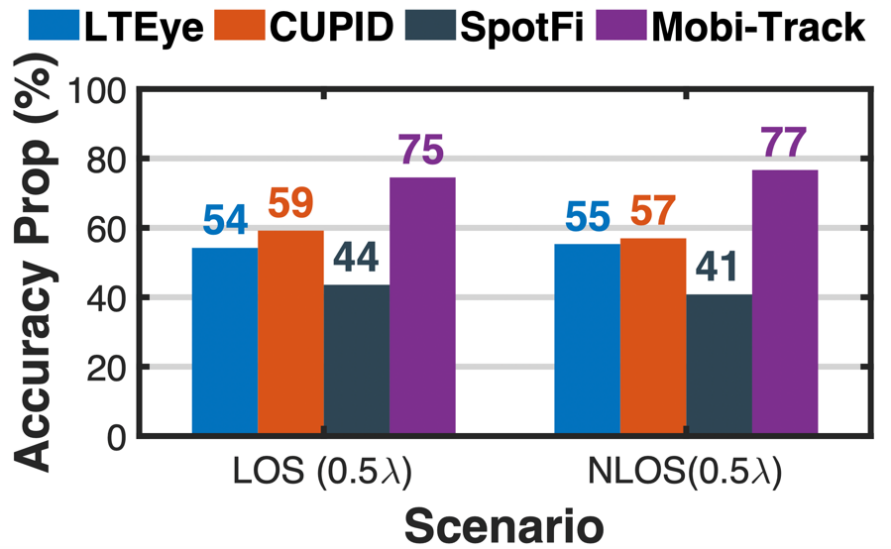
(2) In different environments (visible environment and non-visual environment), the accuracy rate of direct path recognition can reach more than 75%.
(3) Experimental results show that the time burden of the accelerated positioning system is reduced to half of the original one.