Period
2021.06-2022.06
Introduction
Robotics has advanced significantly over the past few decades, becoming more agile and precise, and the degree of precision in robot operation is key to future applications. Today's robots integrate a variety of advanced technologies, such as motion control and actuators, to perform various tasks such as welding and surgery. Robots need a real-time localization system that is low-cost, highly accurate, and can handle obscure situations. This project aims to implement a 3D localization system that allows the robot to achieve object manipulation with millimeter-level accuracy. The project team will build the system based on existing commercial RFID devices and propose a series of innovative techniques to enhance the system's performance. It is expected that this system will be able to provide accurate localization services in a variety of application scenarios.
Methodology
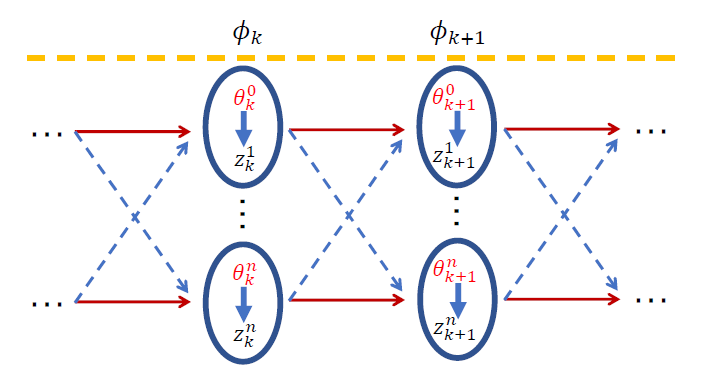
Ⅰ.A tracking framework based on Hidden Markov Model
We chose to model the motility as a hidden Markov model to eliminate ambiguity. The basic problem of RFID localization is to find the most likely sequence of positions of the corresponding tags, given a chronological sequence of phase observations. First, we model the state of motion at each location. Then, we extend the phase observations into discrete distance observations. Correspondingly, each state corresponds to a distance observation. Thus, the initial problem is transformed into a new one: given a set of distance observations, find the sequence of states with the highest probability. To find the optimal trajectory, the simplest way is to calculate the likelihood of the observation sequence for each trajectory and then select the trajectory with the highest observation likelihood among all possible trajectories. We perform Kalman filtering on each trajectory and estimate its moving state continuously.
Ⅱ.Fast inference algorithm using nearest neighbors
One major drawback of the hidden Markov model is its high time complexity, with the number of candidate trajectories growing exponentially as the number of phase reads increases, which contradicts our goal of real-time tracking. Since the reading time is already minimized by updating with only one phase reading at a time, we mainly reduce the computational complexity. We design two techniques to improve the computational efficiency, namely nearest neighbor pruning and initial state pruning.
Achievement
At present, the project has been successfully concluded as planned. After unremitting work, we put forward corresponding solutions to the problems raised respectively and built a complete. During the execution of the project, I submitted a paper marked the special fund of the Central University's Basic scientific research operational expenses in IET Communications, and applied for an invention patent marked the special fund of the Central University's basic scientific research operational expense.