Introduction
Recently, RF-tracking has attract much attention from both the industry and research community as it benefits more and more applications in human-computer interaction, business analytics and smart homes. Ideal indoor RF-tracking systems, particularly for RFIDs, should satisfy the following four requirements:
Complete:A complete tracking system should be able to provide precise initial position estimations and fine-resolution tracing services at the same time.
Accurate:They should be as accurate as other RFID-based systems, achieving 3-10 cm median trajectory errors.
Fast:Areal-time tracking system should try to reduce all possible delays, including hardware turnabout, tag reading, and computation overhead.
Cost-effective:A practical RF-tracking system should achieve the same or better accuracy without increasing hardware cost.
With all the above goals in mind, we present RF-Pen, a practical and complete RF tracking system that achieves centimeter-level real-time tracing with 4 antennas. It delivers the most accurate real-time positioning and tracing services among all the state-of-the-art systems using
comparable hardware.
Methodology
We design RF-pen based on a key observation that tracing accuracy mainly depends on tracing resolution and initial position error. So we first design selective hologram with large antenna-separation (Fig. 2). Using the antenna pair with wide separation (Fig. 1), we can obtain a family of fine-resolution hyperbolas. Thus, by intersecting the hyperbolas at the mutually perpendicular directions, RF-Pen generates a handful of candidate points. While our selective hologram guarantees fine tracing resolution, it inevitables introduce ambiguity among all the candidate points and affects initial position error significantly. To address this, unlike previous systems, e.g., RF-IDraw, choose to use more antenna pairs and readers, we novelly introduce hybrid voting that integrates both Received Signal Strength Indicator(RSSI) and phase measurements together to estimate the initial position. Also, we take care of a number of measurement errors brought by noise and antenna diversity.
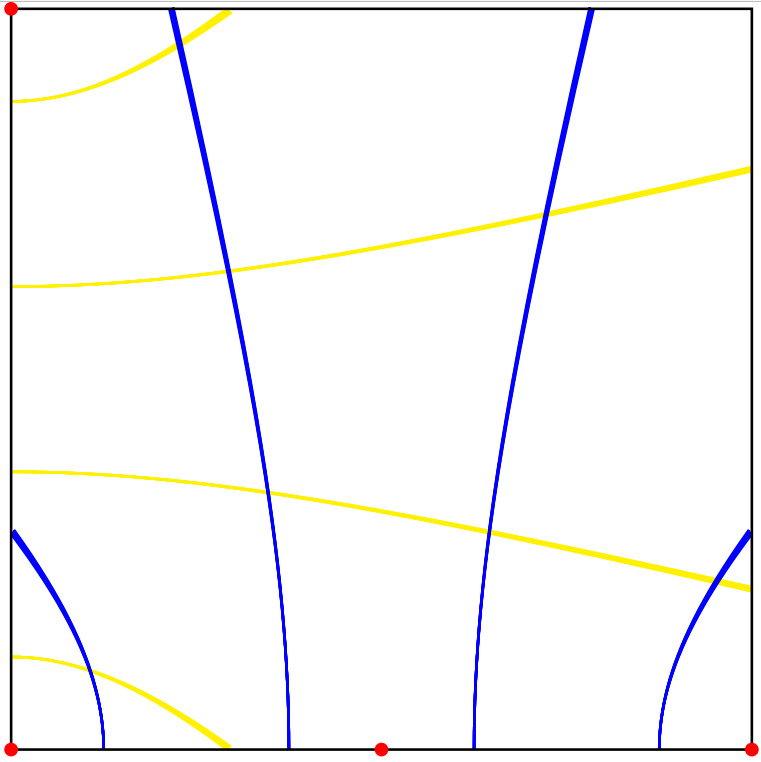
Fig. 1. Antenna placement comparison. A red dot symbols an antenna.On each side, the antenna pair with wide separation will produce many hyperbolae (The middle antenna doesn’t function at this stage). The intersections of blue and yellow hyperbolas are candidate points.
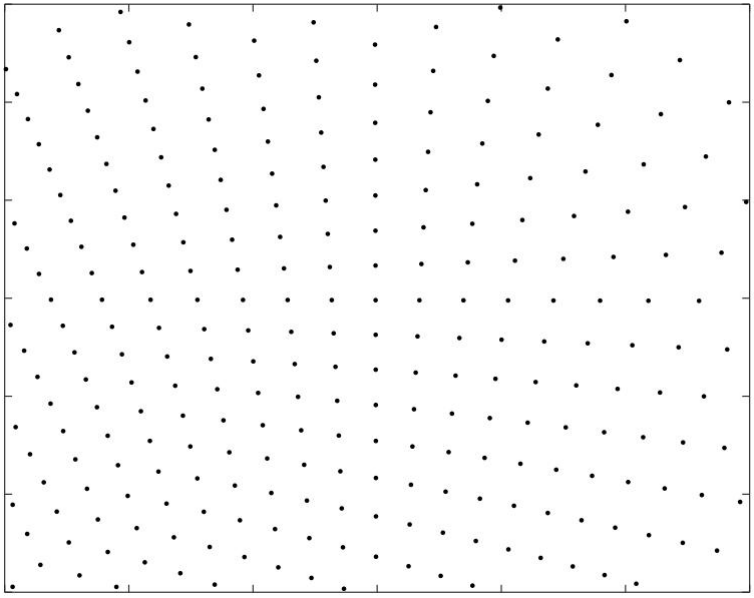
Fig. 2. selective hologram. After obtaining all candidate points, we assign equal weights to all points by default and call it a selective hologram. Compared with the plain hologram, the selective hologram not only has higher resolution, but also can significantly reduce the computation overhead.
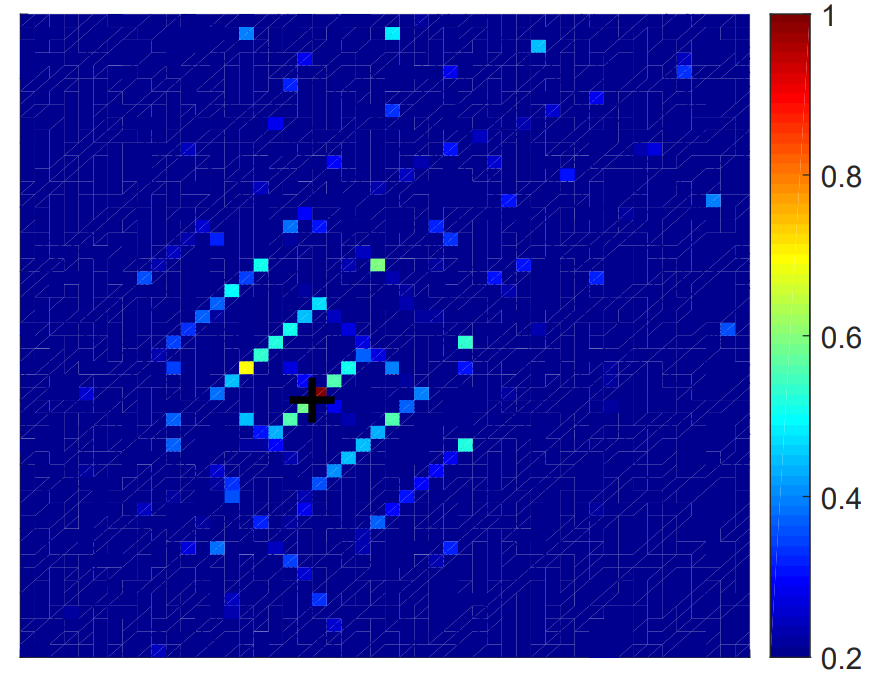
Fig. 3. Hybrid Voting. Combining RSSI-based and phase-based voting, the point closest to the groundtruth has the highest likelihood. Moreover, points with high votings are distributed around the groundtruth.
Achievement
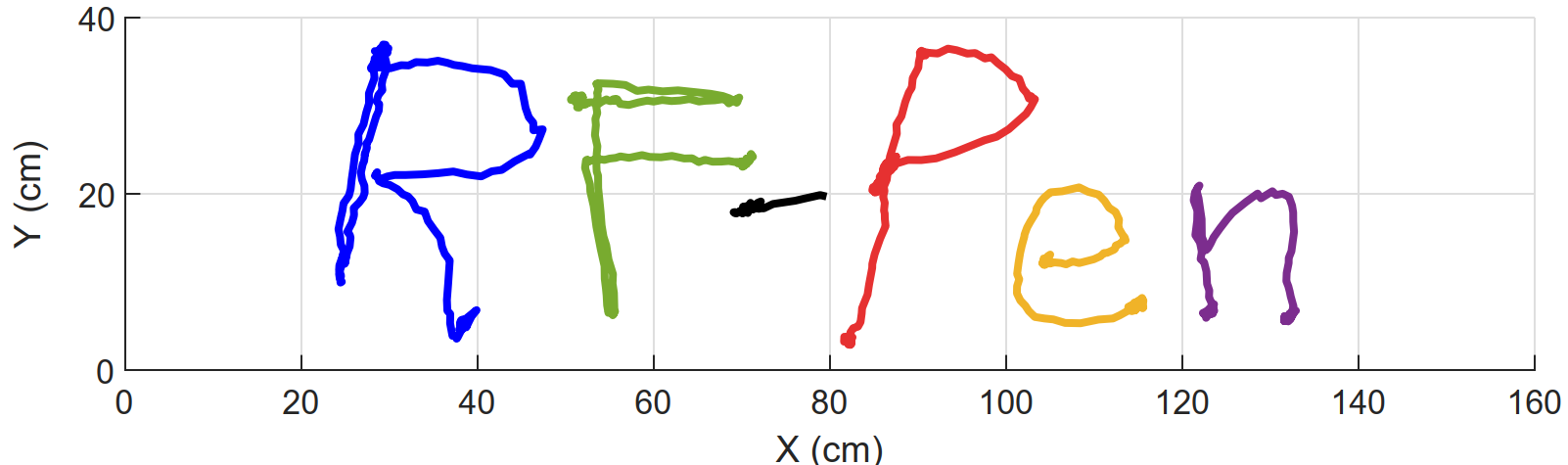
We implement RF-Pen with a ThingMagic M6e reader of 4 antennas. Extensive experiments are done to evaluate and compare it against state-of-the-art systems. Our results show that RF-pen achieves a median initial position error of 12.8 cm, which is 4:1 and 1:5 more accurate than RFIDraw with 4 antennas and 8 antennas, respectively. For trajectory accuracy, RF-Pen achieves a median trajectory error of 2.15 cm, which is 3:7 and 1:7 better than RF-IDraw with 4 antennas and 8 antennas. Furthermore, RF-Pen is able to do character recognition at 97.9 percent success rate. A sample tracing result is shown in Fig. 4.
To the best of our knowledge, RF-Pen is the first complete RF-tracking system based on COTS devices that achieves 2.15 cm tracing error using only 4 antennas in real-time. We have evaluated its effectiveness and practicality, which will benefit a lot of applications.