移动提高准确性:使用COTS RFID系统进行精确的机器人操作
摘要
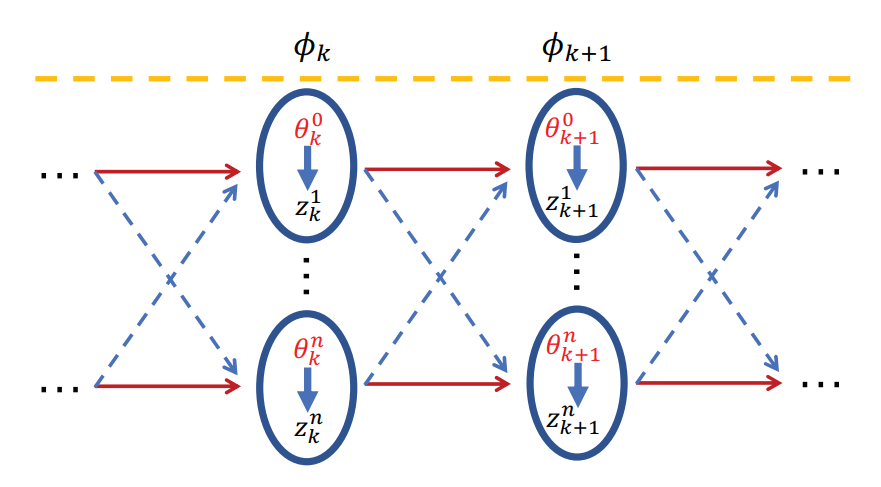
这篇论文提出了GLAC,一个能够使用商用RFID设备实现毫米级物体操纵的3D定位系统。GLAC的关键洞察是,移动性减少了歧义,从而提高了精度。与需要额外的时间或硬件来提高性能的现有系统不同,它利用了以一种精细的方式建模移动性的能力。具体来说,我们建立了一个基于隐马尔可夫模型(HMM)的实时跟踪框架。在我们的框架中,设计了多个卡尔曼滤波器,用于对单个相位观测进行移动状态更新,以及一个快速推理算法,用于有效地处理指数级数量的候选轨迹。我们仅使用UHF标签和一个带有四个天线的商用读写器来原型化GLAC。综合实验表明,x/y/z维度的中位数位置精度在LoS和NLoS情况下都在1厘米以内。对于缓慢移动的目标,其中位数位置精度为0.41厘米,比TurboTrack、Tagoram和RF-IDraw分别提高了2.2倍、17.3倍和14.9倍。此外,对于快速移动的目标,其中位数速度精度至少比所有三个竞争对手好20倍。除了精度,它还比现有系统实现了4倍以上的定位时间收益。
作者
王浩宇,陈思,龚伟
期刊\会议
IEEE PerCom (CCF-B) [Link]
关键词
RFID,实时追踪