项目来源:
中科大双创项目
项目简介:
无线射频识别技术RFID,凭借其较好的定位精度在室内定位等领域有着广泛的应用。基于RFID的定位系统一般由RFID标签、参考标签与读卡器三部分组成,其中读卡器既可以发出信号标签,也可以读取标签的识别码与信号;而RFID标签被激活后可以发射包含自身信息的信号,因此当待定位的RFID标签在读卡器范围内时,读卡器便可以通过读取该标签的识别码来对其进行定位。而目前几乎所有商用RFID读卡器都可以返回标签信号的相位读数,其与读卡器和标签之间的距离可以通过公式进行计算。然而相位每经过半个波长就会变成0,这会为定位带来歧义性,因此消除定位过程中的歧义性是必要的。此外,理想的定位系统应当做到准确实时,而消除歧义性会带来额外计算开销,因此提高实时性也是亟需解决的问题。
项目目标:
提高使用商用RFID设备的定位系统的精确性和实时性上。
项目方法:
为了消除歧义性,我们将运动性建模进隐马尔可夫模型中。将相位观测扩展成离散的距离观测。相应的,其中每一个状态都对应着一个距离观测将相位观测扩展成离散的距离观测。因此我们的问题就是给定一个距离观测的集合,找出可能性最大的轨迹。最简单的方法是计算每个轨迹的观测序列的可能性,然后在所有可能的轨迹中选择观测可能性最大的轨迹。
隐马尔可夫模型很大的缺点是高时间复杂度,这与实时追踪的目标相矛盾,因此需要提高计算效率,而我们主要将任务放在降低计算复杂度上。我们设计了最近邻剪枝和初始状态剪枝两种技术。前者的基本思想是只选择最近的距离观测来减少候选轨迹的数量,这种技术可确保候选轨迹的数量始终与初始状态的数量相同,接下来我们减少初始状态的数量。为了估计初始点的位置,我们采用三边测量法。但同一时刻我们只能读取一根天线的相位,因此选择使用插值法来同步不同天线的相位读数。
广泛的的定位系统中,常常会存在多个子载波,它们包含丰富的相位信息,但这些子载波对于定位系统的贡献往往是不一致的。因此我们可以快速筛选出最优的子载波用于定位来进一步提升系统的实时性。我们将其视为一项分类任务,并设计一个卷积神经网络来自动选择最佳候选子载波。我们选择MobileNet-V2作为骨干网络,这是一个轻量级网络,具有340万个参数,它由17个Bottleneck堆叠而成。在实验中我们只利用相位信息作为CNN的输入,最后可以从深度学习模型的输出中获得分数向量。因此,我们选择得分最高的类别作为最佳候选子载波的索引从而快速甄选出最优子载波。
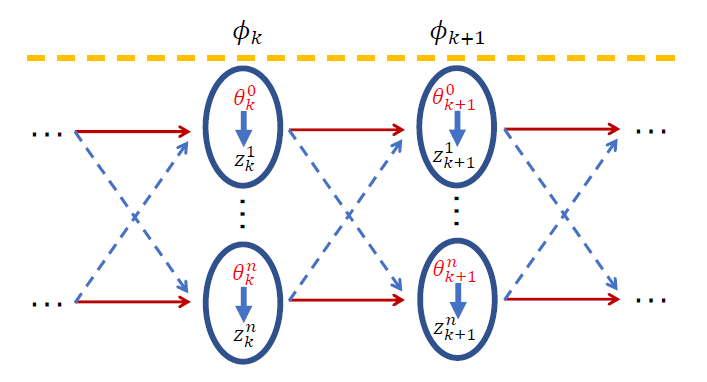
图1 隐马尔可夫模型
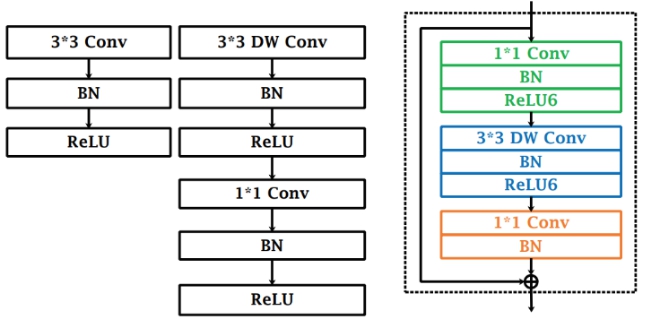
图2 Bottleneck结构图
项目成果:
目前该项目已按计划顺利结题。经过不懈的工作,我们针对所提出的问题分别提出了相应的解决方案并搭建了完整的。在项目执行期间,在IET Communications投稿了一篇标注“中央高校基本科研业务费专项资金资助”的论文,并在项目执行期间申请了一项标注“中央高校基本科研业务费专项资金资助”的发明专利。