项目来源:
中科大双创项目
项目简介:
近年来,RF追踪技术在工业界和学术界都得到了巨大的关注。它可以用于许多具体应用,包括人机交互接口,商业分析和智能家居。理想的室内RF追踪系统,特别是使用RFID技术的系统,需要满足下述的四项要求:完全性:一个完全的系统应可以同时提供准确的初始位置估计以及高精度的追踪服务。准确性:它需要像其它RFID系统一样准确,达到3-10cm甚至更好的中位轨迹精度。快速性:一个实时追踪系统应当尝试尽可能地减少包括硬件调度、标签阅读和计算开销在内的一切时延。廉价性:一个实用的RF追踪系统应当在不增加硬件的情况下达到相当或更高的精度。根据上述四个目标,我们推出了RF-Pen,一种实用且完全的RF追踪系统,它能够使用4根天线实现厘米级的实时追踪。在使用相同数目硬件的实时定位追踪系统中,RF-Pen的精度最高。
项目目标:
一种实用且完全的RF追踪系统,它能够使用4根天线实现厘米级的实时追踪。在使用相同数目硬件的实时定位追踪系统中,RF-Pen的精度最高。
项目方法:
我们对RF-Pen的设计基于一个关键的观察:追踪精度主要决定于追踪分辨率和初始定位误差。所以,我们首先设计了具有较大天线间距的选择性全息图(图2)。使用具有较大间距的天线对(图1),我们可以得到一族高分辨率的双曲线。接着,通过把两个正交方向上的双曲线相交,RF-Pen产生了大量的候选点。虽然选择性全息图保证了高分辨率,但它不可避免地引入了候选点之间的歧义性,显著增加了初始定位误差。为了解决这个问题,不同于使用更多天线对的RF-IDraw,我们引入了混合投票技术。它可以综合RSSI和相位信息来更加准确地估计初始位置。同时,这种技术也考虑到了噪声和硬件多样性引入的测量误差。
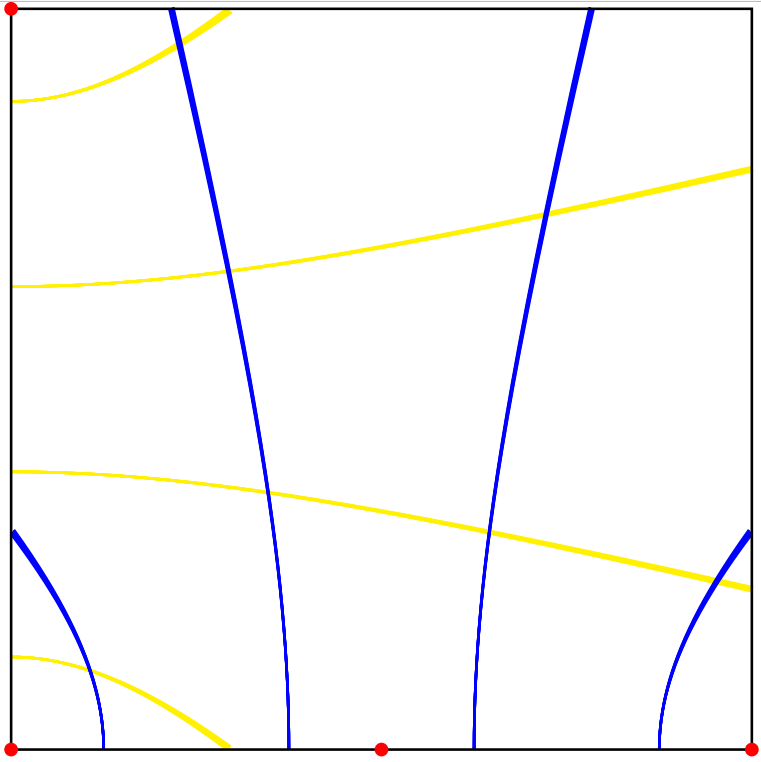
图1. 天线排布,红色代表天线。在每一条边上,有着较大间距的天线对都会产生许多双曲线波束 (在当前阶段,中间的天线不发挥作用)。蓝色和黄色双曲线的交点就是候选点。
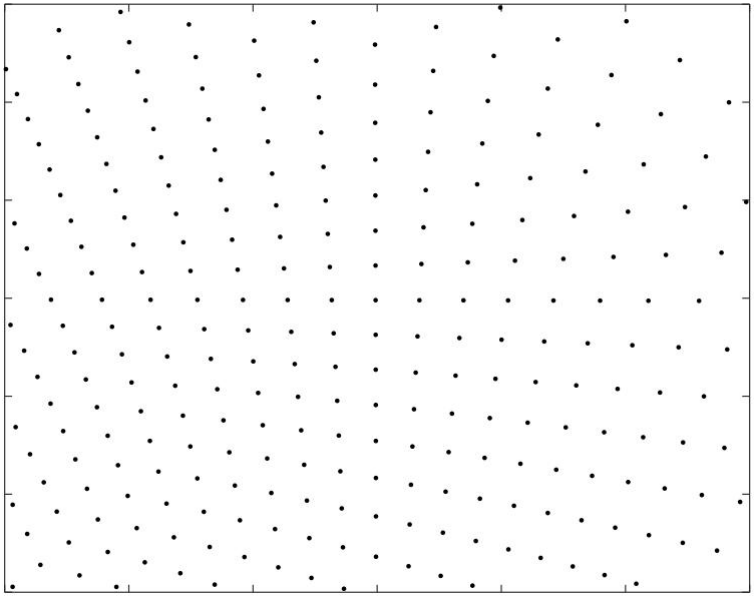
图2. 选择性全息图。在得到所有候选点之后,我们对所有点默认赋予相等权重,并把它称作选择性全息图。相较于朴素全息图,选择性全息图不仅有着更高的分辨率,而且可以大幅降低运算复杂度。
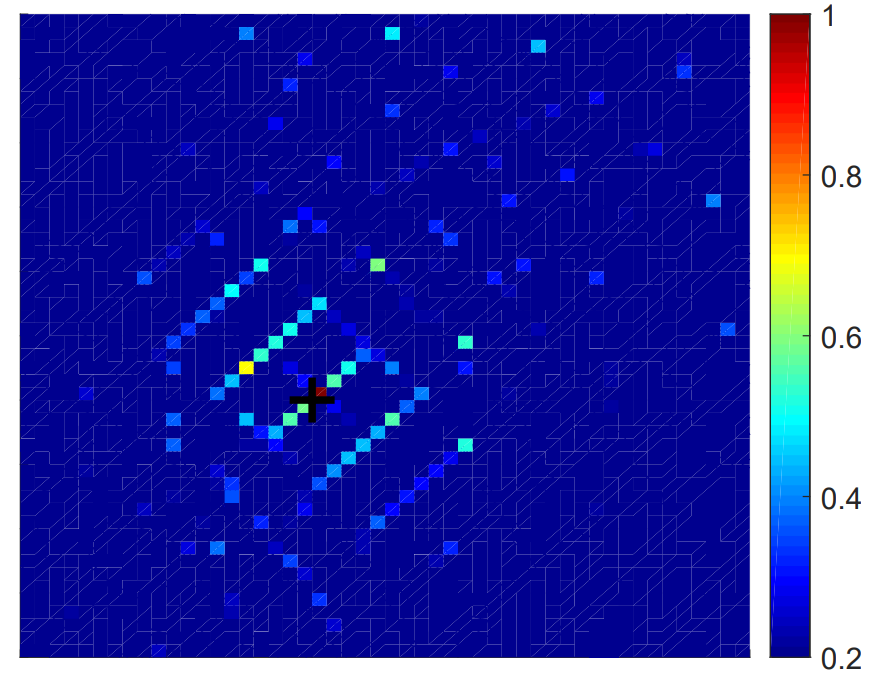
图3. 混合投票技术。在综合了基于相位和RSSI的投票技术后,有最高可能性的点位于真实位置。而且,所有票数较高的点都分布在真实位置附近。
项目成果:
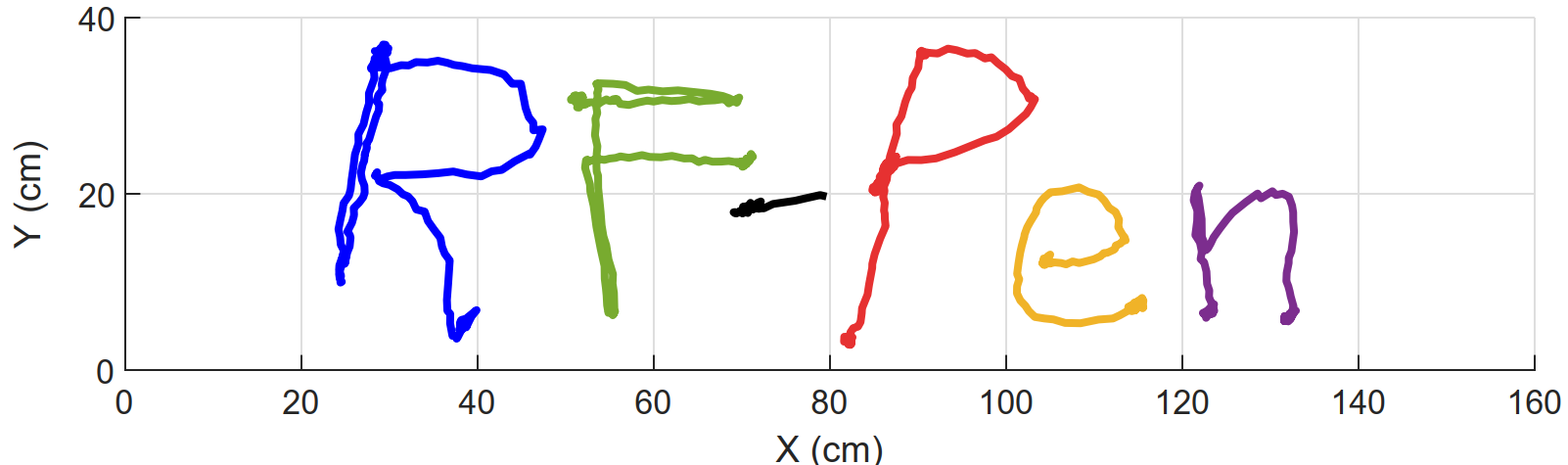
我们使用具有4个天线端口的ThingMagic M6e Reader实现了RF-Pen,并进行了广泛的实验以评估它的性能并与现有的系统进行比较。结果显示,RF-Pen达到了12.8的中位定位精度,这是4天线版RF-IDraw的4.1倍,8线版RF-IDraw的1.5倍;至于轨迹精度,RF-Pen的精度中位值达到了2.15cm,这是4天线版RF-IDraw的3.7倍,8天线版RF-IDraw的1.7倍。此外,在字符识别上,RF-Pen还可以达到97.9%的正确率。一个简单的追踪结果如图4所示。就我们所知,RF-Pen是第一个仅使用4根天线就能实现2.15cm追踪精度的完全的RF追踪系统。我们的实现证明了它的有效性和实用性,可以使游戏和人机交互等一系列应用受益。